

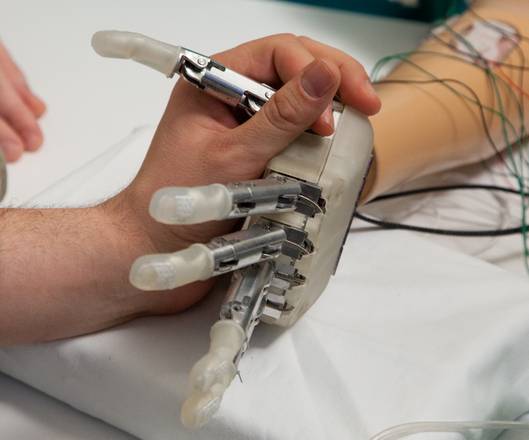
Life Hand 2 è la seconda fase di un laborioso progetto che ha condotto alla realizzazione di una protesi biomeccatronica di arto superiore in grado di esplorare l’ambiente attraverso i propri sensori, con capacità di manipolazione degli oggetti paragonabile a quella di una mano umana.
La mano robotica imita perfettamente in dimensioni e peso (poco più di 600gr) la mano naturale ed è in grado di percepire consistenza, forma e durezza degli oggetti manipolati.





Il progetto è il risultato di un lungo lavoro coordinato da Silvestro Micera, docente presso l’Ecole Polytechnique Federale di Losanna (Svizzera), che ha sfruttato proficuamente le sinergie provenienti da ricercatori di diversi centri italiani ed europei.
La protesi è stata impiantata ad un uomo danese di 36 anni, Dennis Aabo Sørensen, che aveva perso la propria mano sinistra a causa dello scoppio a Capodanno di un petardo. Il paziente è stato selezionato accuratamente per le sue caratteristiche di resistenza allo stress ed alla fatica necessarie per portare a termine le dure sessioni di stimolazione che lo hanno coinvolto.
Ciò che ha reso tale progetto rivoluzionario risiede nell’implementazione all’interno della mano del protocollo di comunicazione bidirezionale real-time, che realizza la possibilità di inviare segnali dalla protesi al cervello (sensazioni) e dal cervello alla protesi (intenzioni di movimento). È importante, infatti, fornire al paziente un feedback di ciò che succede nella protesi in quanto lo aiuta ad accettare meglio il dispositivo e a sentirlo parte del proprio corpo.
Naturalmente l’ispirazione è di natura biologica, essendo la protesi atta a sostituire non solo l’arto amputato ma anche la sua funzionalità in maniera quanto più possibile fedele.
Di seguito spieghiamo brevemente in che cosa consiste tale tipo di comunicazione.
- Le fibre afferenti sono fibre che portano gli impulsi nervosi dai recettori sensoriali che si trovano in periferia verso il SNC (sistema nervoso centrale). Il contatto, ad esempio, viene percepito dal cervello solo dopo che le informazioni sono state trasmesse dai nervi afferenti.
- Le fibre efferenti (o motoneuroni) sono le vie nervose che trasportano il messaggio neurale dal SNC verso la periferia; esse quindi tramutano l’intenzione di moto nella corrispondente risposta meccanica.

Per implementare tale meccanismo all’interno di una protesi artificiale, è stato necessario inserire quattro elementi fondamentali:
FLUSSO AFFERENTE
- Sensori tattili, al fine di inviare al cervello le informazioni su forma, consistenza, posizione degli oggetti e pressione esercitata nel contatto con essi;
- Elettrodi intraneurali (denominati TIME), inseriti all’interno di due nervi del braccio sinistro amputato, in grado di inviare il flusso di informazioni recepite in periferia ai nervi del paziente e da qui fino al cervello.
FLUSSO EFFERENTE
- Elettrodi miografici di superficie (sEMG), in grado di inviare i comandi motori agli attuatori della mano robotica;
- Attuatori in grado di realizzare il corretto movimento naturale con l’applicazione della giusta forza.
Questa comunicazione bidirezionale è stata riprodotta ad una velocità tale da restituire l’esperienza motoria e sensoriale in tempo reale, ovvero senza intervalli di latenza significativi (ritardi tra sensazione e reazione). Due algoritmi elaborati ad hoc dal team di ricerca hanno permesso di realizzare il circuito di comunicazione bidirezionale:
- il primo algoritmo traduce i segnali provenienti dai sensori tattili in impulsi elettrici al SNC;
- il secondo decodifica i segnali provenienti dagli sEMG e li trasforma in comandi motori.
Da sottolineare l’innovatività apportata dagli speciali elettrodi TIME, impiantati trasversalmente rispetto ai fascicoli nervosi, in modo da realizzare molteplici punti di contatto con le fibre nervose ed aumentare la possibilità di comunicazione con il SNC, senza introdurre un numero di sensori troppo elevato. Tali contatti elettrici, realizzati in Platino e Ossido di Iridio su un substrato flessibile, hanno evidenziato una elevata capacità di attivazione selettiva delle fibre nervose in modo tale da stimolare il paziente con impulsi d’intensità particolarmente bassa.
L’operazione chirurgica per l’impianto degli elettrodi ha avuto luogo presso il Policlinico Gemelli di Roma ed è durata oltre sette ore. Per tre settimane successive all’operazione, il paziente è stato soggetto ad esercizi specifici per l’apprendimento degli impulsi elettrici condotti attraverso gli elettrodi neurali. Solo successivamente è stata attuata la fase di sperimentazione con il dispositivo protesico collegato al moncone del paziente: il paziente, bendato ed isolato acusticamente, ha svolto esercizi di riconoscimento al tatto di oggetti di forma e consistenza differenti, in modo tale da poter verificare le capacità percettive e sensoriali “ricostruite artificialmente”. Al termine della sperimentazione la mano robotica è stata rimossa poiché lo studio è ancora in fase di sperimentazione-ricerca: le sfide future consisteranno nella realizzazione di una comunicazione bidirezionale totalmente intraneurale (ovvero senza l’utilizzo degli elettrodi miografici di superficie) e nell’utilizzo di campi magnetici per stimolare i nervi.
Tale progetto costituisce una pietra miliare per il futuro della mano robotica integrata sul sistema-uomo. Per ottenere tali risultati, il team ha integrato le attuali conoscenze biologiche sul funzionamento del sistema nervoso con le ricerche più avanzate della biorobotica. L’obiettivo del feedback sensoriale è stato raggiunto appieno, come confermato dal paziente stesso:
“Quella del feedback sensoriale per me è stata un’esperienza stupenda. Sembra incredibile poter sentire la consistenza differente degli oggetti, capire se sono duri o morbidi e avvertire come li sto impugnando. Il feedback inoltre è molto naturale. Sono convinto che questo sia il futuro delle protesi nel mondo”.
Riferimenti: “Life Hand 2 – Rassegna Stampa”




