

Un nuovo tipo di protesi “attiva” riesce a sfruttare il controllo neuronale e integrare la capacità di utilizzare stimoli multisensoriali relativi al contesto esterno per istruire i muscoli anche in arti amputati.
La postura biomeccanica
Da bambini, dopo grande sforzo e impegno, impariamo ad alzarci, a mantenere una posizione eretta e poi a mettere un piede dopo l’altro per iniziare a camminare. Da adulti questa sembra un’azione naturale, spontanea, ma la verità è che ogni passo compiuto altera il nostro equilibrio dinamico portando a comportarci come pendoli.
Strategie
Mentre camminiamo, la forza peso è continuamente bilanciata dalla reazione del terreno.
Tale bilanciamento prevede che, quando la proiezione del centro di massa sul pavimento supera il centro di pressione (CoP), vengano messe in atto le cosiddette strategie di caviglia, di anca e di passo per recuperare l’equilibrio (Figura 1).
Per questo motivo, lo studio del cammino nel corpo umano è eseguito attraverso il modello del doppio pendolo. Tale modello prevede la modellizzazione della gamba come la composizione di due segmenti, ovvero coscia e polpaccio, connessi fra loro da un giunto a cerniera (i.e., l’articolazione di ginocchio) e al resto del corpo tramite un punto di rotazione (i.e., l’articolazione di anca).

Credits: polito.files
Limiti delle protesi convenzionali
I recenti sviluppi nel mondo della protesica hanno portato alla realizzazione di dispositivi meccanici con logica di controllo ad alto livello, in grado di far recuperare la capacità di movimento a pazienti amputati in diversi contesti dinamici, grazie all’implementazione di articolazioni attive e controllabili.
Una strategia di controllo ad alto livello sfrutta algoritmi ideati esplicitamente per indurre la plasticità motoria, ovvero il rimodellamento di aree cerebrali conseguente ad una attività pratica che consente di acquisire – apprendere – e conservare le abilità motorie.
Nell’uomo, i sistemi vestibolare, visivo e propriocettivo percepiscono e raccolgono dall’ambiente esterno informazioni da inviare al sistema nervoso centrale, che a sua volta regolano l’adattamento alle perturbazioni in maniera reattiva (feedback) o anticipatoria (feedforward).
Il limite delle protesi meccaniche
Proprio la mancanza della capacità di predire e compensare non permette alle protesi meccaniche di assicurare la stabilità della postura del paziente. È per questo motivo che il team di ricercatori della University of North Carolina ha suggerito di sfruttare il controllo neuronale e la sua adattabilità al “task context”, ovvero la capacità di integrare stimoli multisensoriali relativi al contesto esterno e rispondere con sequenze adeguate di attivazioni muscolari.
Il ruolo dell’elettromiografia
Nell’ambito biomeccanico, l’elettromiografia (EMG) ha tre diverse principali applicazioni:
- indicatore dell’attivazione muscolare;
- relazione con la forza prodotta dal muscolo;
- indice di affaticamento del muscolo.
Il sistema nervoso umano è ancora in grado di coordinare il reclutamento dei muscoli recisi che non hanno più una funzione meccanica?
Per rispondere a questa domanda, Aaron Fleming e gli altri ricercatori del dipartimento di Ingegneria Biomedica del North Carolina hanno deciso di studiare l’ampiezza del segnale EMG prodotto dai muscoli residui presenti nell’arto inferiore in seguito ad amputazione.
L’elettromiografia è una musa seduttiva perché ci consente di ottenere facile accesso a processi fisiologici che determinano la generazione di forza da parte del muscolo, producono il movimento e compiono innumerevoli funzioni che ci permettono di interagire con il mondo attorno a noi.
Prof. Carlo J. De Luca, Boston University, NeuroMuscular Research Center
L’indagine sperimentale
Nello studio condotto dai ricercatori dell’Università del North Carolina, un uomo di 57 anni, 3 anni post-amputazione dell’arto inferiore al livello della tibia, è stato equipaggiato con una protesi transtibiale di nuova generazione.
Il design del dispositivo fornisce al soggetto, rispetto alle protesi tradizionali, più spazio per il movimento nella direzione antero-posteriore, pur mantenendo una adeguata stabilità grazie al maggior carico nella direzione medio-laterale. Allo stesso tempo, viene fornito più spazio al tibiale anteriore (TA) e al gastrocnemio mediale (GAS), entrambi muscoli residui, per contrarsi in una condizione di comfort e quindi di ridotto affaticamento muscolare (Figura 2).

La metodologia di ricerca
L’ampiezza del segnale registrato durante la contrazione di TA e GAS, una volta estratto l’inviluppo protesico, è stata utilizzata per modulare l’attività di muscoli artificiali pneumatici e il funzionamento delle valvole di pressione nella simulazione della flessione dorsale/plantare (Figura 3).

Feedback visivo
Un ruolo importante in questo studio è ricoperto dal feedback visivo fornito al soggetto durante la fase di esplorazione libera del dispositivo protesico: in questo modo il partecipante ha ottenuto una chiara comprensione della relazione input-output esistente tra la reciproca attivazione e co-attivazione volontaria dei muscoli residui e la dinamica dell’articolazione meccanica di caviglia.
Valutazione motoria
Successivamente, al soggetto non è più stato fornito il feedback visivo e lo studio è proseguito con una valutazione motoria iniziale delle sessioni sperimentali di allenamento, con esercizi eseguiti durante un arco temporale di 8 giorni (Tabella 1) ed una valutazione finale dei risultati.
Per le sessioni di valutazione, è stato chiesto al partecipante di rimanere in posizione eretta in diverse condizioni sensoriali, tra cui con occhi aperti (Eyes Open, EO), occhi chiusi (Eyes Closed, EC) e su due diverse superfici: una di gomma piuma (Foam) e una solida (Firm).
L’esecuzione di queste attività è stata valutata da un terapista esperto assegnando dei punteggi (Score = 3 mantenimento stabilità per 30s, Score = 2 nel caso di 30s instabili, Score = 1 per mantenimento stabilità per meno di 30s, Score = 0 incapace di mantenere equilibrio).
Per le sessioni di allenamento, sono stati selezionati dei compiti rilevanti per la vita di tutti i giorni:
- trasferimento di un carico;
- movimento in piedi-seduto;
- sollevamento del braccio;
- spostamento in avanti.
La scelta di esercizi diversi nelle due fasi mira a dedurre l’effetto dell’allenamento nel globale mantenimento della postura eretta piuttosto che sulla stabilità specifica durante il singolo task.

Durante ogni sessione di allenamento, un clinico ha assistito all’esecuzione dei compiti da parte del soggetto. Tra una ripetizione e la successiva, sono stati forniti suggerimenti riguardo la simmetria del corpo, il meccanismo di movimento, la posizione dei piedi e il loro allineamento. Il paziente ha inoltre ricevuto incoraggiamento a bilanciare equamente il peso su entrambi gli arti e indicazioni verbali riguardo il reclutamento muscolare mentre imparava ad eseguire l’attività specifica.
Controllo neuronale
Per analizzare la strategia di controllo neuronale è stata rappresentata l’evoluzione del centro di pressione e sono stati messi a confronto i segnali elettromiografici ottenuti dal muscolo tibiale e gastrocnemio dell’arto intatto con quelli residui dell’arto amputato. L’analisi dei dati si è basata sul calcolo della cross-correlazione delle serie temporali e sull’estrazione dei relativi coefficienti al tempo zero (CC0), degli angoli articolari e della flessione di anca, ginocchio e caviglia.
Primi risultati: efficacia del protocollo sperimentale
Il soggetto ha evidenziato miglioramenti di postura in termini di stabilità nella posizione eretta, grazie al controllo della protesi meccanica attraverso EMG (Tabella 2).
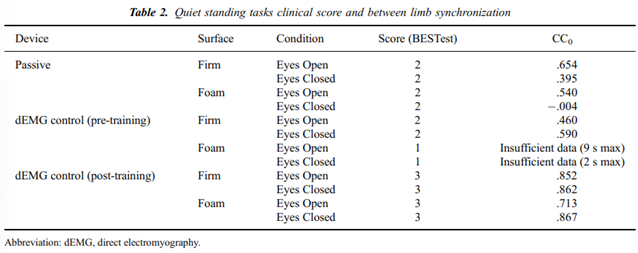
Il controllo neuronale ha sollecitato una maggiore coordinazione motoria tra l’arto intatto e quello amputato. Occorre anche specificare che la sincronizzazione dell’escursione del CoP tra i due piedi, nel corso degli anni, è diventato un importante indice da considerare nell’ambito del controllo della postura in pazienti con questa tipologia di deficit.
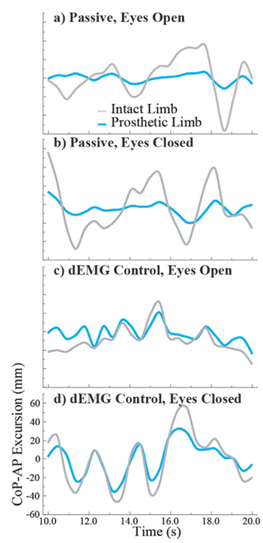
Nello studio si è dimostrato che non solo il controllo tramite EMG ha permesso una maggiore ampiezza di escursione del centro di pressione nel lato amputato, più simile ai valori registrati per l’arto intatto (Figura 4), ma ha anche portato, in condizione di post-training, ad un potenziamento dell’indice di sincronizzazione dell’escursione del CoP tra i due piedi (Figura 5).
Sono stati inoltre osservati qualitativamente gli stadi di apprendimento successivi da parte del paziente – durante il training – che lo hanno portato a gestire in maniera più efficace, simmetrica e completa la protesi. Questo risultato apre quindi alla possibilità di implementare le normali “strategie di controllo” (di caviglia, di anca e di passo) tipicamente osservate nei soggetti sani.

Studi precedenti avevano evidenziato un miglioramento nel controllo elettromiografico di un dispositivo protesico di caviglia durante il cammino, sfruttando un feedback visivo dell’angolo prodotto dall’articolazione meccanica.
Questa ricerca estende tale tipo di risultati, considerando che l’apprendimento si è manifestato solo sotto la guida verbale di un terapista e quindi superando la necessità di un input visivo che, seppur efficace, ne limita l’applicabilità biomimetica e quotidiana.
Conclusioni e prospettive e future
Lo studio statunitense si presenta quindi come una promessa verso l’applicazione nel mondo reale del controllo EMG di una protesi meccanica, con gli annessi benefici clinici che ne deriverebbero:
- prevenzione di lesioni secondarie post amputazione;
- normalizzazione di attività di vita quotidiana – come danzare, saltare, sollevare un bambino.
Attraverso tale ricerca si è dimostrata la possibilità da parte del soggetto di agire in maniera significativa sull’angolo della protesi di caviglia, consentendo un miglioramento complessivo della postura ed una maggiore libertà di movimento senza l’impedimento di una articolazione rigida.
Basandosi su questi risultati, entusiasmanti ma comunque insufficienti per definire in maniera completa i benefici di una protesi controllata attraverso EMG, studi futuri potrebbero orientarsi verso la realizzazione un dispositivo che possa essere testato al di fuori del laboratorio per analizzare gli effetti sulla vita quotidiana e su attività svolte in movimento. Anche l’analisi delle fasi di apprendimento svolta in maniera quantitativa e l’inclusione di un maggior numero di partecipanti (e.g., soggetti con caratteristiche diverse) potrebbero rappresentare il giro di boa nella ricerca biomeccanica.
Rimane inoltre ancora aperta la domanda circa quali meccanismi neuronali siano responsabili per l’osservato adattamento nell’attivazione dei muscoli residui.
Fonti e approfondimenti
- Cambridge University Press – Direct continuous electromyographic control of a powered prosthetic ankle for improved postural control after guided physical training: A case study
- Journal of applied biomechanics – The use of the EMG in biomechanics




